Contemporary operating systems are built around the concept of processes or tasks. A task is an execution stream in the context of a particular task state. Organizing system activities around tasks has proved to be a useful way of separating out different activities into coherent units. To effectively utilize hardware resources, an operating system must interleave the execution of multiple tasks and still provide reasonable response times. These tasks may or may not be related, should not directly affect the state of another task, but usually always need to share resources in a protected, prioritized, and equitable manner.
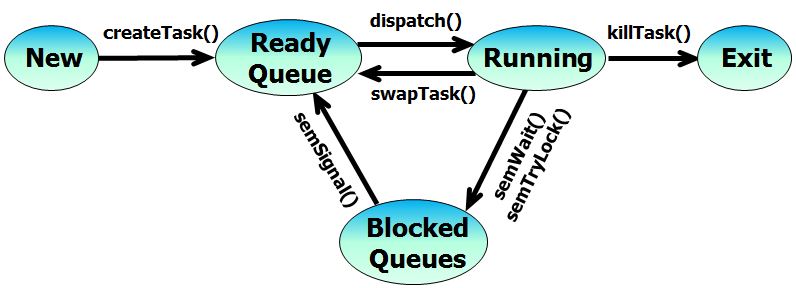
Add a five-state task scheduler to your operating system capable of executing up to 128 tasks in a preemptive, prioritized, round-robin manner. At any point in time, a task will be newly created, ready to run, running, blocked waiting for some event to occur, or exiting. A five-state task scheduler is illustrated as follows:
The following are important guidelines for this scheduling project:
A context switch between tasks involves interrupting a task, saving the task state (CPU registers, status, stack values), and then restoring the state of the next scheduled task exactly as it was just before it was interrupted. The swap process requires that each task have its own stack for local variables and function arguments as well as a system or kernel stack (used as a foothold and for privileged functions). Stack state is captured with the C setjmp function and restored with the C longjmp function. Our operating system will be cooperative preemptive for context switching, hence you must place SWAP directives liberally throughout your tasks to force a context switch. The SET_STACK directive inserts an assembly language instruction that switches the stack pointer from the kernel stack to a new user stack. This is only done once when a new task is created. The flow of a new task is illustrated below:
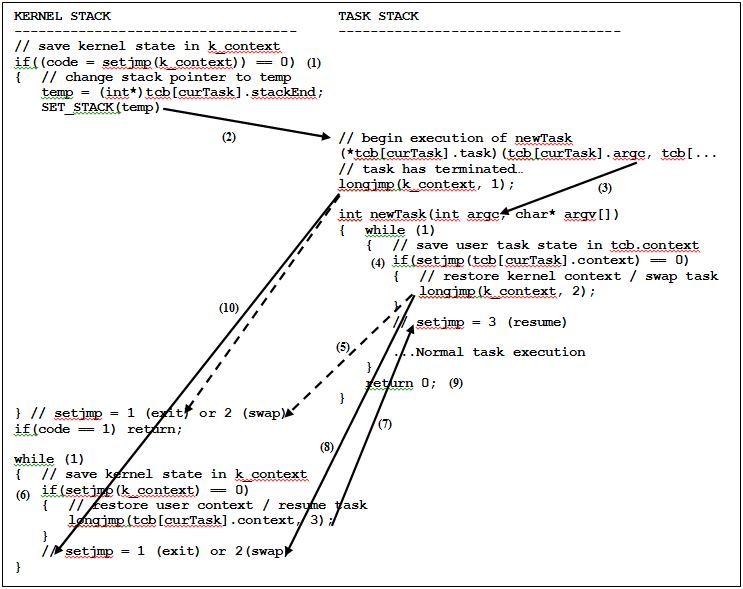
(1) The state of the OS kernel is saved in k_context. (2) A new stack is created and execution continues off the new task stack. (3) A task (function) begins execution. (4) The task state is saved in the TCB struct context. (5) The task does a context switch to the kernel stack with code=2. (6) A new kernel context is again saved in k_context. (7) The task is “rescheduled” by restoring the state saved in the task TCB. (8) Subsequent context switches return directly into the scheduling loop. (9) A task terminates by returning from the function. (10) The task either returns just before the scheduling loop (no swap occurred) or within the scheduling loop again. This has all been implemented for you in the swapTask and dispatch routines.
The before mentioned context switching functionality is accomplished by the swapTask() function (os345.c). This function is called by the SWAP directive and may be called from anywhere in your system when not in the kernel state (for obvious reasons). SWAP instructions should be placed liberally throughout your code to simulate preemptive scheduling.
In order to thoroughly test your mutual exclusion logic, TA’s are at liberty to ask you add a SWAP command anywhere in your code during pass-off. Make sure critical sections of your code are protected by mutex semaphores.
#define SWAP swapTask();
// ***********************************************************************
// Do a context switch to next task.
// Save the state of the current task and return to the kernel.
void swapTask()
{
// either context switch or continue
if(setjmp(tcb[curTask].context)) return;
// swap task
if(tcb[curTask].state == S_RUNNING) tcb[curTask].state = S_READY;
longjmp(k_context, 2);
} // end swapTask
Three system functions are called from within the operating system scheduling loop. The pollInterrupts() function (os345.c) checks for simulated keyboard and timer "interrupts" and signals the corresponding signals/semaphores. Other asynchronous event handlers may be added later to this function. Any task waiting on a signaled semaphore should be moved to the ready state.
The scheduler() function (os345.c)returns the task index (curTask) of the highest priority ready task. Tasks of the same priority should be scheduled in a round-robin, FIFO fashion. If there are no tasks ready for execution (all are suspended), then a -1 is returned and no task is scheduled.
A task is executed or rescheduled from the dispatcher() function (os345.c).
while(1) // scheduling loop
{ // check for character / timer interrupts
pollInterrupts();
// schedule highest priority ready task
if((curTask = scheduler()) < 0) continue;
// dispatch curTask, quit OS if negative return
if (dispatcher(curTask) < 0) break;
} // end of scheduling loop
A task is a C function and has its own stack. Consequently, it is re-entrant and variables retain their values throughout the scope and/or life of the function. Generally, tasks are repeated over and over as external events occur. To accomplish this, one might surround the task code with a while(1) and put a SEM_WAIT at the top of the loop. (The task must periodically give up control for other tasks to execute.)
The question is asked, "If the highest priority task is always executing, won’t there be tasks that never execute?" The answer is "Yes!" Starvation can occur and needs to be handled by proper usage of semaphores as well as judicious placement of SWAP commands.
A task (function) terminates when it returns to the operating system.
// ***********************************************************************
// signal task
int signalTask(int argc, char* argv[])
{
int count = 0; // task variable
while(1)
{
SEM_WAIT(semSignal); // wait for signal
printf("\n%s Task[%d], count=%d", taskName, curTask, ++count);
}
return 0; // terminal task
} // end signalTask
A task is scheduled for execution by the createTask() function (os345tasks.c). There are five arguments for the createTask function: a task name, task address, priority, argc, and argv arguments. The task priority ranges from 1 to SHRT_MAX (+32767 – found in limits.h), low to high priority. The createTask() function makes copies of argc and argv arguments in new malloc'd variables which are passed to the task when it is first called.
// create task signal1
createTask("signal1", // task name
signalTask, // task
VERY_HIGH_PRIORITY, // task priority
argc, // task argc
argv); // task argv
Your scheduler is to be demonstrated in person to a TA. The assignment is worth 10 points, which will be awarded as follows:
3 pts Replace the simplistic 2-state scheduler with a 5-state, preemptive, prioritized, round-robin scheduler using ready and blocked task queues. (Be sure to handle the SIGSTOP signal.) 2 pts Implement counting semaphores within the semSignal, semWait, and semTryLock functions. Add blocked queues to your semSignal and semWait semaphore functions. Validate that the SEM_SIGNAL / SEM_WAIT / SEM_TRYLOCK binary and counting semaphore functions work properly with your scheduler. (Note: SEM_TRYLOCK will be tested in Project 3.) 2 pts Modify the createTask() function (os345tasks.c) to insert the new task into a prioritized, round-robin ready queue. Modify if necessary the killTask() and sysKillTask() functions such that individual tasks can be terminated and resources recovered. (This would include all semaphores created by the killed task.) Modify the list tasks command to display all tasks in the ready and blocked queues in execution/priority order indicating the task name, if the task is ready, paused, executing, or blocked, and the task priority. If the task is blocked, list the reason for the block. 2 pts Add a 10 second timer (tics10sec) counting semaphore to the timer_isr() function (os345interrupts.c). Include the <time.h> header and call the C function time(time_t *timer). SEM_SIGNAL the tics10sec semaphore every 10 seconds. Create a reentrant, high priority task that blocks (SEM_WAIT) on the 10 second timer semaphore (tics10sec). When activated, output a message with the current task number and time and then block again. 1 pt Upon entering main, your shell (CLI) should be scheduled as task 0. Have the project2 command schedule timer tasks 1 through 9 and observe that they are functioning correctly. The shell task blocks (SEM_WAIT) on the binary semaphore inBufferReady, while the "TenSeconds" tasks block on the counting semaphore tics10sec. The "ImAlive" tasks do not block but rather immediately swap (context switches) after incrementing their local counters. The high priority "Signal" tasks should respond immediately when semaphore signaled. -1 pt for each school day late.
Thus, the following tasks, priorities, and blocking semaphores should appear in the list of tasks:
# Task Name Priority Time slice Blocking Semaphore 0 CLI w/pseudo-input interrupts 5 1 inBufferReady 1-9 TenSeconds 10 1 tics10sec 10 sTask1 20 1 sTask10 11 sTask2 20 1 sTask11 12 ImAlive 1 1 None 13 ImAlive 1 1 None
In addition, after completing the above requirements, the following bonus points may be awarded:
+1 pt Pass-off lab at least one day before due date. +1 pt Implement buffered pseudo-interrupt driven character output and demonstrate that it works by using a my_printf function in place of printf (for Project 2 only.) Use a consumer / producer model with my_printf putting printable characters in an output buffer (producer) and pollInterrupts getting and printing the buffered characters one at a time (consumer). +1 pt Implement time slices that adjust task execution times when scheduled. Modify the createTask() function (os345tasks.c) to include the time slice when the task is created. (Each call to the swapTask() function (os345.c) constitutes one time slice.)
NOTE: Bonus points may be received anytime before the next project is due (regardless of any late penalties) as long as all the project requirements have been completed.